







Am Freitag, den 18.03.16 fanden mit dem Start von REXUS 19 ca. 1,5 Jahre Entwicklungszeit ihren krönenden Abschluss. Die letzten zwei Wochen ist so viel passiert, dass wir noch gar keine Zeit hatten, euch mit unseren Bildern aus Esrange zu versorgen. Das holen wir hiermit nach.
Die letzten Wochen waren für uns alle sehr anstrengend, da gerade auch Prüfungszeit an der Uni Stuttgart ist. Trotzdem haben wir einiges geschafft.
Wir haben den neuen modifizierten Wildlife Tracker getestet, der uns von Namtrack Namibia zur Verfügung gestellt wurde, und haben hier sehr positive Ergebnisse erhalten. Wir haben die Kapsel in mit Wasser getränkten Tüchern gewickelt (um die Abschirmung des Schnees zu simulieren) im Wald versteckt und konnten sie auf eine Entfernung von ca. 150m innerhalb von 12 Minuten wiederfinden!
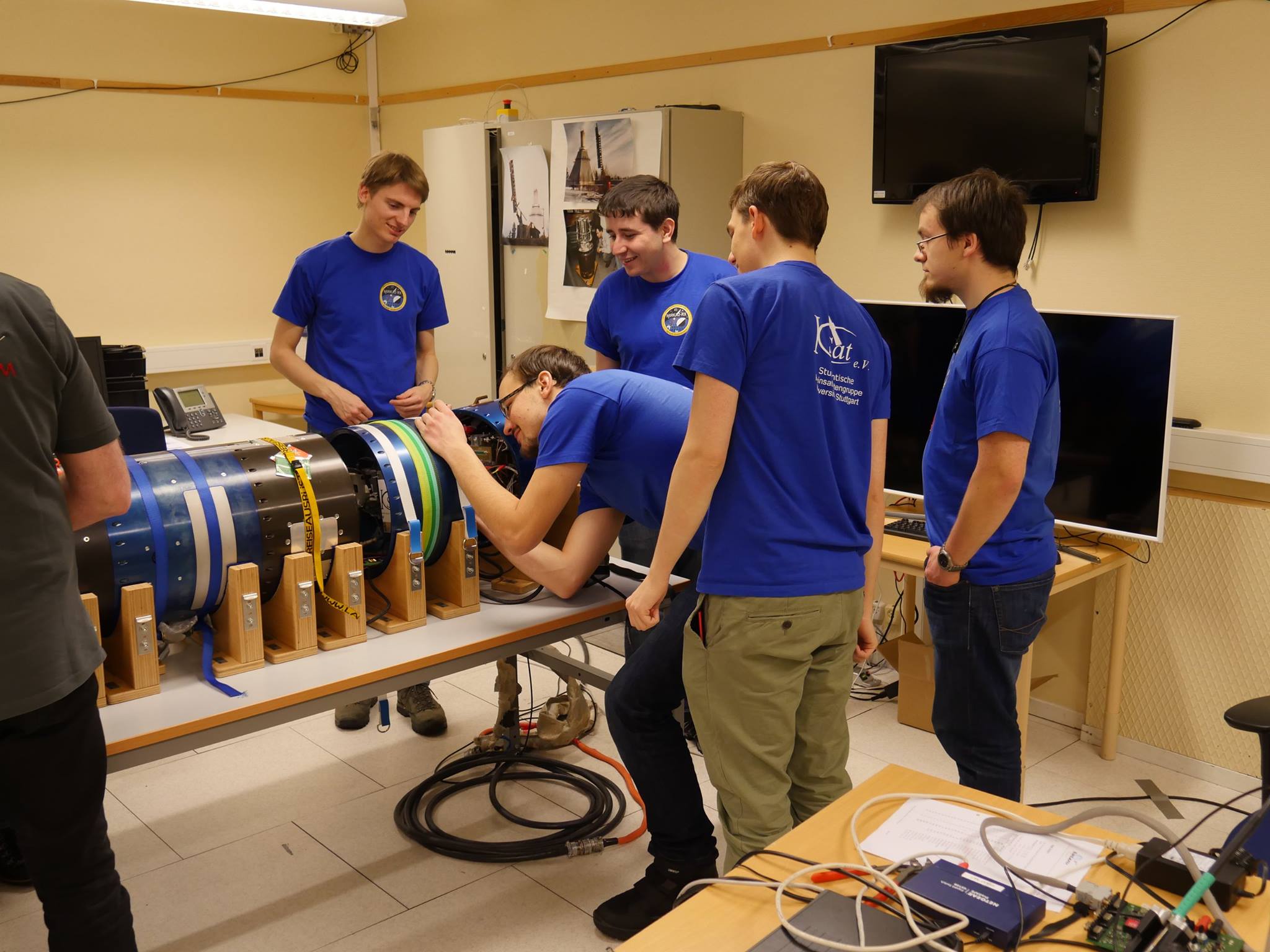
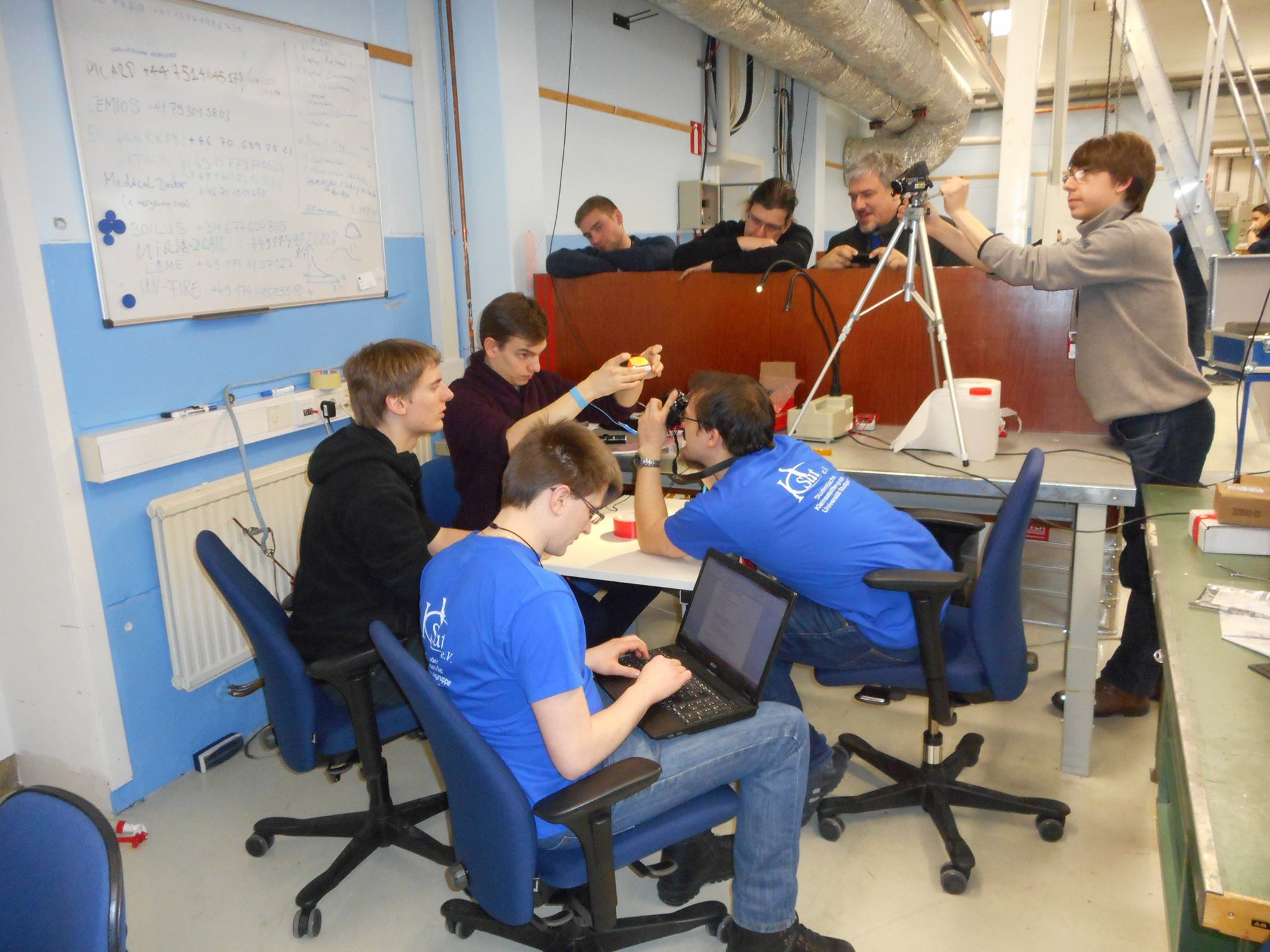
Die Elektronik in der Kapsel wurde nochmal auf volle Funktionstüchtigkeit getestet und wir bekommen von allen Sensoren gute Messwerte.
Schlussendlich haben wir dann letzte und vorletzte Woche unsere Experimentenkiste fertig gepackt und zum DLR nach Oberpfaffenhofen geschickt, von wo es dann weiter dann Kiruna geleitet werden wird.

Die nächsten Tage und Wochen wird jetzt hauptsächlich noch an der Kapselsoftware weitergearbeitet um die letzten Features zu implementieren. Wir sind aber auch hier auf einem guten Stand und es bleibt uns nur noch zu sagen:
Kiruna wir kommen!

Wir sind in Kiruna! Sechs unserer Teammitglieder sind gestern nach Kiruna aufgebrochen und haben das Ziel nach einem langen Tag mit vielen ungeplanten Zwischenstopps letztendlich auch erreicht. Unsere Reise ging unter anderem auch über Umea und wurde mit Polarlichtern über den Wolken belohnt!
Nun geht es also in die letzte Phase von unserem MIRKA2-RX Experiment, an dem wir seit über eineinhalb Jahren arbeiten. Wir zählen die Minuten bis zum Start nächste Woche und arbeiten hart um unseren Traum endlich wahr zu machen. Gleichwohl möchten wir euch mit ein paar schönen Impressionen von unserer Reise an dieser spannenden Zeit teilhaben lassen.!





Die letzten Wochen waren für uns alle sehr anstrengend, da gerade auch Prüfungszeit an der Uni Stuttgart ist. Trotzdem haben wir einiges geschafft.
Wir haben den neuen modifizierten Wildlife Tracker getestet, der uns von Namtrack Namibia zur Verfügung gestellt wurde, und haben hier sehr positive Ergebnisse erhalten. Wir haben die Kapsel in mit Wasser getränkten Tüchern gewickelt (um die Abschirmung des Schnees zu simulieren) im Wald versteckt und konnten sie auf eine Entfernung von ca. 150m innerhalb von 12 Minuten wiederfinden!
Die Elektronik in der Kapsel wurde nochmal auf volle Funktionstüchtigkeit getestet und wir bekommen von allen Sensoren gute Messwerte.
Schlussendlich haben wir dann letzte und vorletzte Woche unsere Experimentenkiste fertig gepackt und zum DLR nach Oberpfaffenhofen geschickt, von wo es dann weiter dann Kiruna geleitet werden wird.


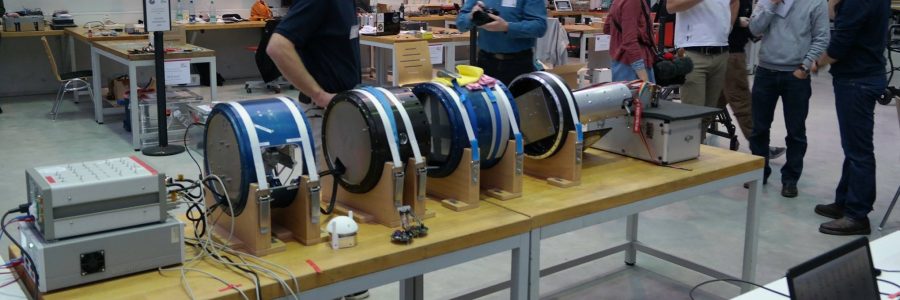
Der Start unseres Experiments ist nur noch wenige Woche entfernt! Als letzten Schritt vor dem Raketenstart in Kiruna Anfang März haben wir erfolgreich den Benchtest in Oberpfaffenhofen bestanden. Dort wurden alle Experimentmodule mit dem Servicemodul der Rakete verheiratet und verschiedene Tests bezüglich des Ablaufes und der Auswürfe durchgeführt.



Für die Woche von Montag, den 7.12. bis zum Freitag, den 11.12.2015 hat sich ein Teil des MIRKA2-RX Teams in Bremen um die ordentliche und finale Integration des Experiments in das Modul der REXUS Rakete gekümmert. Die Integration hat im ZARM, zu Füßen des Bremer Fallturms stattgefunden.
Das Team bestand aus dem Teamleiter Daniel Galla, den beiden Mechanics Mitgliedern, Martin Siedorf und Alexander Tabelander, und den beiden Elektronics Mitgliedern Alexander Behnke und Athanasios Papanikolaou.

Durch die vorgezogene Ankunft auf Montagabend konnte sich das kleine Team bereits am Dienstag mit dem Zusammenbau der einzelnen Teile im Modul beschäftigen und schaffte es somit zum planmäßigen Termin für den Shaker Test am Mittwochmittag mit nur 20 Minuten Verspätung bereit zu sein.


Auf dem Shaker Tisch wurden alle drei Achsen des Experiments in dem Modul auf Qualifikations Level getestet. Abgesehen von einer kleinen Mutter, bei der eindeutig mehr Loctite fehlte, und einem elektronischen Buzzer auf der Platine, in der Mirror Box, hat das gesamte Experiment den Vibrationen stand gehalten.
Nach dem Shaker Test wurde die Mirror Box abermals demontiert, um das Experiment elektronisch für den Separationstest vorzubereiten. Bei diesem Test wird zuerst die Hatch des Moduls abgetrennt und weg gestoßen. Dann wird der Mirror Box das Freigabesignal gegeben und der Pyrocutter von LOTUS kann gezündet werden. Die Separation hat nach dem Verbessern einer provisorischen elektrischen Leitung problemlos funktioniert.
Am Freitag, dem letzten Tag der Integration Week, wurden alle Module zusammengestellt und elektronisch verbunden. Der Ablauf des Raketenstarts wurde mehrmals mit den dazugehörigen Signalen durchlaufen. Unsere OCU (Onboard Controller Unit) hat alle Signale korrekt erhalten und die richtigen bzw. die erforderlichen Signale und Kommandos weiter gegeben. Ein letzter Fehler im Ablauf der Signale wurde noch entdeckt und konnte ausgebessert werden.
Unser Experiment ist somit in seinem Aufbau fertig. Es muss nur noch die finale MIRKA2 Kapsel und deren Platinen in dem Module platziert werden und wir sind bereit für den finalen Bench Test vor dem Raketen Start.


Am vergangenen Donnerstag, 23. Juli, fand in Zusammenarbeit mit dem AKAFUNK-Team Stuttgart der erste Test des Beacons statt. Der Beacon ist ein kleiner Sender, der etwa jede Sekunde auf einer bestimmten Funkfrequenz ein einfaches Ping-Signal (Piepton) aussendet und uns von NamTrack Namibia zu Verfügung gestellt wird. Auf diese Weise wollen wir die MIRKA-RX-Kapsel nach der Landung orten, unterstützt von übermittelten GPS-Positionsdaten und Bahnberechnungen.
Diese Technik wird häufig dazu verwendet, um Wildtiere in Schutzgebieten zu verfolgen. Auch wir verwenden einen sogenannten „Wildlife Tracker“ des Unternehmens NamTrack aus Namibia, den wir für unser Experiment zweckentfremden. Um die Tiere nicht zu behindern ist dieser Beacon sehr klein, weshalb wir ihn gut in der Kapsel einsetzen können.
Mit den Tests, die im Büsnauer Wiesental und im Pfaffenwald nahe der Universität stattfanden, wollten wir herausfinden, wie groß die maximale Reichweite des Senders ist, wie stark das Signal von der Kapselhülle und der Umgebung abgeschirmt wird und wie schwer es tatsächlich ist, den versteckten Sender in der Natur zu finden.
Die Tests verliefen sehr erfolgreich. Die maximale Entfernung, über die das Signal geortet werden kann, beträgt etwa 1 Kilometer, wobei dieser Wert stark vom verwendeten Empfänger und dessen Antenne abhängt. Wir verwendeten einen relativ einfachen Empfänger, bei der Nutzung eines hochwertigeren Empfängers, der eventuell auch mit einem Laptop gekoppelt wird, lässt sich die Reichweite noch um ein Vielfaches erhöhen.
Befindet sich der Beacon mit zusammengerollter Antenne in der Alukapsel, die wiederum vom Whipox-material umgeben ist, reduziert sich die Reichweite erwartungsgemäß deutlich, da das Antennenfeld durch das Aluminium „kurzgeschlossen“ wird; das nicht-leitende Whipox-Material hat hingegen bisher keinen messbaren Einfluss. Die maximale Reichweite reduzierte sich somit um etwa 90% auf etwa 100 Meter.
Die etwa gleiche Reichweitenreduzierung tritt ein, wenn sich der Sender ungefähr 1 Meter „unter der Erde“ befindet; etwa wenn die Kapsel in tiefen Schnee oder Schlamm einschlägt oder starke Bodenvegetation auftritt. Wir simulierten diesen Effekt, indem wir den Sender (wieder ohne Umhüllung) in einer Röhre in einem Kanal platzierten. Die Reichweite reduzierte sich dabei auf knapp 100 Meter.
Dies klingt zunächst nach einer sehr geringen Reichweite, man muss aber bedenken, dass der Beacon nur zur Feinortung der Kapsel dient: Selbst in einem ungünstigen Fall sollte die GPS-Positionsangabe auf einige hundert Meter genau sein, so dass es kein Problem darstellt, ausgehend von dieser Positionsangabe den Beacon zu finden; insbesondere weil ja auch ein leistungsstärkerer Empfänger verwendet werden wird.
Schließlich wurde das Suchen des Beacons geübt. Dazu wurde dieser von einem Mitglied des Teams in der Umgebung versteckt, und anschließend von den übrigen Personen versucht, ihn mittels Antennenpeilung zu finden, was an eine „Schnitzeljagd“ erinnerte. Peilung bedeutet, dass die mitgeführte Empfangsantenne gedreht wird; zeigt die Antenne (genauer gesagt die Maxima/Minima des Antennenfeldes) in Richtung des Beacons, so ist das empfangene Signal am stärksten. Auf diese Weise nähert man sich nach und nach dem Beacon an. Da der Beacon aufgrund seiner geringen Größe leicht zu übersehene ist und es bei Verwendung nur eines Empfängers leicht zu „Fehlpeilungen“ aufgrund von Reflektionen an festen Objekten kommen kann, ist bei der Suche etwas Geduld (und Ausdauer in den Beinen) gefragt. Dennoch gelang es uns ohne Probleme den Beacon in weniger als einer halben Stunde zu finden, weshalb der Test als klarer Erfolg zu werten ist.
Vielen Dank an AKAFUNK e.V. für die tolle Unterstützung!
Eine Modellkapsel wurde von einem 27 m hohen Baukran abgeworfen, um dabei erste Erkenntnisse zum Flugverhalten zu erlangen und die Beschleunigungssensoren zu testen.
Da MIRKA2 die bis dato kleinste Wiedereinrittskapsel der Welt ist, muss man mit besonderer Sorgfalt ihre Flugeigenschaften bestimmen. Aus diesem Versuch können dann erste Abschätzungen bezüglich der Ausrichtgeschwindigkeit, des Widerstandsbeiwertes und der Stabilität abgeleitet werden.
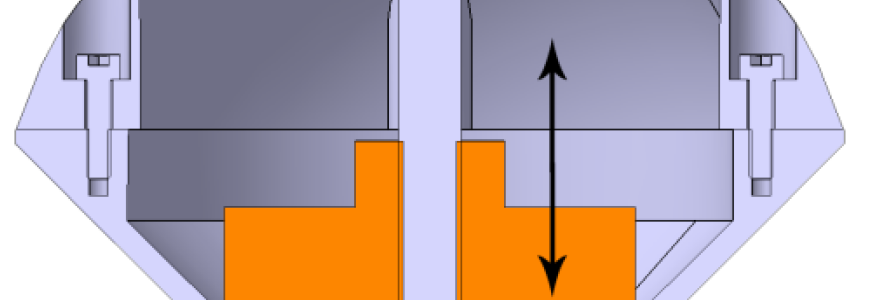
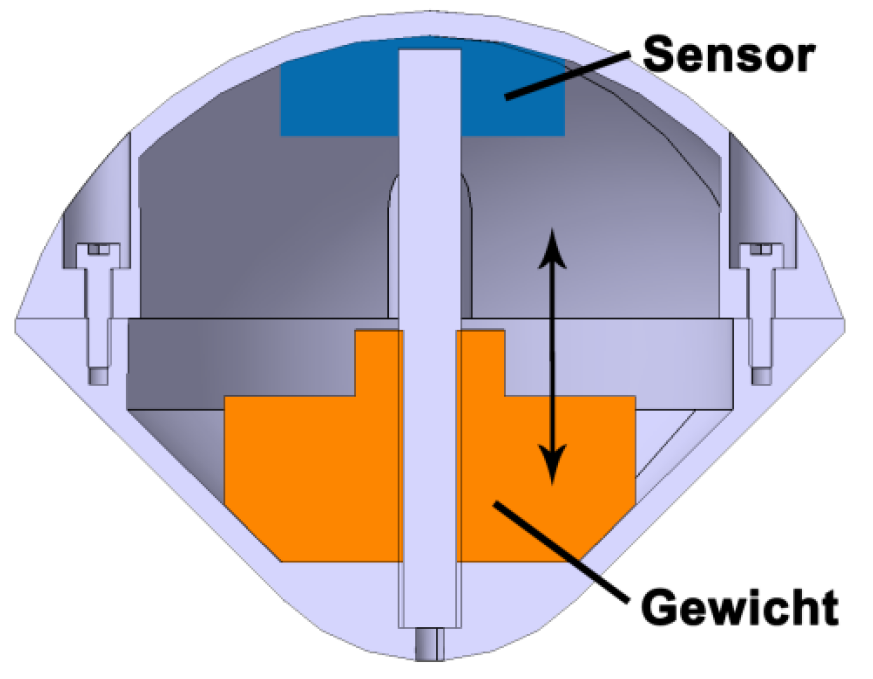
Die Modellkapsel hat den gleichen Durchmesser von 10 cm sowie die gleiche Außenkontur wie die später fliegende Kapsel. Das Innenleben der Kapsel wird durch eine Testmasse aus Kupfer ersetzt, mit der über eine Gewindestange der Schwerpunkt eingestellt werden kann. Der Fall wurde anschließend von Kameras aus verschiedenen Winkeln aufgezeichnet.
Zusätzlich gelang es dem Elektronikteam, trotz hohem zeitlichen Druck, den Mikrocontroller samt Beschleunigungssensor fertig zu stellen, sodass auch die Beschleunigungen innerhalb der Kapsel gemessen werden konnten. Aus diesen Werten lassen sich Lage und Drehgeschwindigkeit zurückrechnen.
Der Abwurftest wurde auf dem Gelände der Albert Wager Bauunternehmung GmbH & Co durchgeführt, welche freundlicherweise ihren Kran für das Experiment zur Verfügung gestellt hat. Zum Abbremsen des Falls der Kapsel wurde im Zielbereich ein Kiesbett errichtet, welches mit Fangnetzten überspannt war. Dank dieser Maßnahmen hat die Testkapsel die zahlreichen Testreihen mit wenigen Kratzern überstanden.
In jedem Experiment wurde am Boden der Schwerpunkt und die Elektronik der Kapsel eingestellt. Danach wurde eine Person im Korb des Krans auf maximale Höhe befördert. Nachdem der Sicherheitsbereich geräumt und alle Kameras ausgerichtet und aktiv geschaltet waren, wurde die Kapsel abgeworfen und deren Fall beobachtet. Dies geschah mit Variationen des Schwerpunktes, des anfänglichen Auslenkwinkels und verschiedener Testmassen.
Erfreulicherweise zeigte sich das Verhalten der Kapsel über weite Schwerpunktseinstellungen stabil und selbst eine Kapsel, die entgegen korrekter Ausrichtung abgeworfen wurde, landete mit der Spitze voran im Netz. Ebenso konnte die Elektronikgruppe hervorragende Ergebnisse zur Kalibrierung ihrer Sensoren sammeln.
Die weitere Analyse der bestehenden Daten wird diese erste qualitative Einschätzung in quantitative Ergebnisse fassen.

Letzte Woche hatten wir wieder einen Workshop im Rahmen unseres REXUS Projektes MIRKA2-RX. Es ging hauptsächlich um die genaue Auslegung unserer Komponenten für den Critical Design Review (CDR) im Juni zu finalisieren.
Das Mechanics Team hat gute Fortschritte bei der Festlegung von LOTUS geleistet. Blaupausen wurden erstellt und Abmaße, sowie Rechnungen angepasst und verbessert. Es gab eine kleine Designänderung bezüglich der Blattfedern. Diese wurden durch Clamps ersetzt.
Im Zusammenbau mit dem Modul wurde die gesamte Haltekonstruktion erstellt und muss als nächstes einen Belastungstest durch Catia absolvieren. Die Anordnung der GoPros wurde festgelegt und die Haltevorrichtung bzw. der Separationsmechanismus für die Hatch ist fast fertig ausgelegt.
Als nächstes folgen genaue konstruktionsbezogene Berechnungen, um die gewählten Bolzen und Bohrungsgrößen zu bestätigen. Genauso läuft auch ein Konstruktionsvergleich von verschiedenen Kamerabefestigungen, welcher nächste Woche entschieden wird.
Das Communication Team hat verschiedene Iridium-Verträge evaluiert und dokumentiert, ein Kandidat sticht besonders heraus (Rock7 mobile). Das Grundgerüst für die Kapselfirmware wurde entworfen, ist zur Zeit jedoch noch ohne höhere Funktionen.
Ein bereits bestehendes Grundgerüst für die Ground Segment Software wurde weiter ausgearbeitet.
Das Elektronics Team hat in diesem Workshop die einzelnen bestellten elektronischen Komponenten auf deren Funktionsfähigkeit getestet. Hier gab es ohne Ausnahmen nur positive Ergebnisse. Weiter wurden die möglichen Verschaltungen der einzelnen Komponenten hardware- und softwareseitig untersucht. Hier ist es uns gelungen erfolgreich zwei Arduino Boards per SPI miteinander kommunizieren zu lassen, es wurden alle Sensoren erfolgreich ausgelesen und die SD-Karte konnte beschrieben werden.
Das Iridium Modul konnte leider aufgrund von fehlenden Komponenten noch nicht getestet werden.
Auch Organisatorisch konnten wir uns in diesem Workshop verbessern. So wurden unsere Projektdatein in MS Project implementiert und die Arbeitspakete wurden detailierter ausgearbeitet.
Alles in allem konnten wir in diesem Workshop einiges voran bringen und sind dem CDR einen großen Schritt näher gekommen.

Vom 1.12. - 2.12.2014 hatten wir Gelegenheit, MIRKA2-RX auf dem Auswahlworkshop des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Bonn vorzustellen.
In diesem Workshop waren nicht nur andere Teams, die ebenfalls ihre Projekte für REXUS/BEXUS vorstellten, anwesend, sondern auch Experten der beteiligten Institutionen, die die Teilnehmer auswählten. Im Verlauf der zwei Tage konnten wir auf diese Weise nicht nur die Projektvorschläge der anderen Teams kennen lernen, sondern auch wertvolle Tipps und Hinweise zum Verlauf des Projekts, den Umgebungen während des Zusammenbaus, Starts, Flugs und der Landung von den Experten erhalten.
Unsere Projektidee wurde überwiegend positiv aufgenommen, trotz einiger noch zu lösender technischer Herausforderungen.
Am Freitag den 12.12. erfuhren wir schließlich, dass MIRKA2-RX auf einer der beiden REXUS-Raketen im Februar/März 2016 mitfliegen wird und dabei die Kapsel und der Separationsmechanismus unter realen Bedingungen getestet werden können. Wir freuen uns sehr, dass uns die Gelegenheit gegeben wird, die nächsten 18 Monate ein gesamtes Raumfahrtprojekt von Anfang bis Ende durchführen zu dürfen.