SOURCE
Stuttgart Operated University Research CubeSat for Evaluation and Education
SOURCE (Stuttgart Operated University Research CubeSat for Evaluation and Education) ist ein Nanosatellit mit den Abmessungen 10 x 10 x 36 cm, der dem 3U+ CubeSat Standard entspricht. Er wird in einer Kooperation zwischen KSat e.V. und dem Institut für Raumfahrtsysteme (IRS) der Universität Stuttgart entwickelt. Als studentischer CubeSat wird er ausschließlich von Studierenden unter der Betreuung vom IRS entwickelt und betrieben. Im Rahmen des Moduls „Praktikum CubeSat-Technik“ haben viele Studierende die Möglichkeit, über ein Semester hinweg praktische Erfahrungen zu sammeln und Leistungspunkte für ihre Mitarbeit am Projekt zu erwerben. Neben der Betreuung des Projekts bietet das IRS zahlreiche Möglichkeiten zum Testen und Entwickeln von Komponenten. Darüber hinaus wird SOURCE durch das Fly Your Satellite!-Programm der ESA gefördert, was den Studierenden ermöglicht, die Entwicklung, das Testen und die Dokumentation gemäß den Standards der European Cooperation for Space Standardization (ECSS) zu erlernen.
SOURCE trägt mehrere wissenschaftliche Nutzlasten, die in zwei Missionsphasen eingeteilt sind. Für die erste Phase wurden zwei Kameras auf SOURCE integriert. Die MeSHCam (Meteor-, Star- and Horiziontracking Camera) dient der Meteorbeobachtung sowie als Stern- und Horizontverfolgung für die Lagebestimmung. Zudem befindet sich die kleinere Farbkamera PRIma (PR-Imager) an Bord, welche für PR-Bilder der Erde genutzt wird. Die zweite Missionsphase beginnt ab 200km und untersucht die Atmosphäre während des Wiedereintritts von SOURCE. Dazu gehören FIPEX-Sensoren an der Vorder- und Rückseite, die die atomare Sauerstoffkonzentration im Orbit messen. Darüber hinaus sammeln Wärmefluss-, Temperatur- und Drucksensoren, die rund um den Satelliten verteilt sind, Daten über die Umgebung des CubeSats.

Unsere Nutzlasten
Missionsphase 1 - Orbit auf 500km Höhe
Startracking
Das Sternverfolgungssystem von SOURCE stellt eine innovative Methode zur Lagebestimmung dar, die mit einer kostengünstigen, kommerziell verfügbaren Kamera realisiert wird. Zuerst fotografiert die sogenannte Meteor-, Star- and Horizontracking Camera (MeSHCam) den Sternhimmel im Weltraum. Anschließend gleicht der Nutzlast Onboard Computer die Bilder mit bekannten Sternmustern ab, um die Ausrichtung von SOURCE präzise zu bestimmen. Diese Nutzung von „Commercial-Off-The-Shelf“ (COTS)-Bauteilen für die Sternverfolgung ist eine zukunftsweisende Technologie-Demonstration, da sie aufzeigt, dass günstige, handelsübliche Komponenten die strengen Anforderungen der Raumfahrt erfüllen können, ohne auf spezialisierte und teurere Geräte zurückgreifen zu müssen.

Meteor-Detektion
Die Meteordetektionsnutzlast an Bord von SOURCE zielt darauf ab, Meteore in der oberen Atmosphäre zu beobachten. Die Daten können unser Verständnis über den Ursprung des Sonnensystems erweitern. Die MeSHCam ist in der Lage, auch schwache Meteore zu erfassen, da das Licht der Meteore im Orbit nicht von der Atmosphäre absorbiert wird. Die Nutzung einer kommerziellen Kamera für diese Beobachtungen zeigt außerdem das Potenzial für CubeSats, kostengünstige optische Systeme für wissenschaftliche Studien im Weltraum zu verwenden. Um zwischen Meteoren und dem Hintergrund zu unterscheiden, führt der Nutzlast Onboard Computer den Detektionsalgorithmus SpaceMEDAL aus, der von Studierenden an der Universität Stuttgart entwickelt wird.

PR-Bilder
Auch die PR Imager (PRIma) Kamera ist eine kostengünstige, kommerzielle Kamera ohne spezielle Qualifikation für die Nutzung im Weltraum. Die Kamera ist leicht angewinkelt an der Stirnseite des Satelliten angebracht. Im Gegensatz zur MeSHCam besitzt die PRIma Kamera einen hochauflösenden Farbsensor. Die kleine Kamera mit den Maßen 3.5 cm x 2.5 cm kann somit PR Fotos der Erde erzeugen. Ein Foto bildet dabei ungefähr 450 km x 340 km Bodenfläche ab, was etwa 40% der Fläche Deutschlands entspricht.
Missionsphase 1 - Externe Nutzlasten

IRAS – Multifunktionale Sandwich-Struktur
SOURCE ist die Testplattform für eine 3D-gedruckte, multifunktionale Sandwichstruktur (MSS) des Deutschen Zentrum für Luft- und Raumfahrt (DLR) Stuttgart und des Fraunhofer Instituts für Produktionstechnik und Automatisierung (IPA) im Rahmen des Integrated Digital Reserach Platform for Affordable Satellites (IRAS) Projektes. Die IRAS MSS besteht aus einer Wabenstruktur aus Kohlefasern. An bestimmten Stellen enthält die Struktur Wolfram, welches die elektrischen Schaltungen vor Strahlung schützt. Außerdem ist ein kleiner Lautsprecher integriert, mit dessen Hilfe die Integrität der Struktur auch im Weltraum bestätigt werden kann.

Dünnschicht-Solarzellen
Fast jede Satellitenmission benötigt Solarzellen, um Strom zu erzeugen. Daher würde eine Gewichtsreduktion der Zellen große Vorteile für viele Missionen bieten. Das DLR Institut für Raumfahrtsysteme untersucht deshalb auf SOURCE die Leistungsfähigkeit von Dünnschichtsolarzellen. Diese biten neben einer Einsparung von Masse auch den Vorteil, biegsam zu sein: So lassen sich mehr Solarzellen auf engem Raum während des Starts unterbringen, bevor sie im Weltraum entfaltet werden. Auf SOURCE sind die Dünnschichtsolarzellen auf der Oberseite angebracht, direkt neben den Hauptsolarzellen des Satelliten.

IRAS SmartHeater
In Kooperation mit Airbus Defence & Space durch das IRAS Projekt wird auf SOURCE ein SmartHeater integriert. Dieses Bauteil erwärmt sich bei anliegender Spannung automatisch auf eine feste Temperatur. Dadurch entfällt die Notwendigkeit von Temperatursensoren oder einem Regelalgorithmus auf dem Satelliten. Das Thermalsystem wird somit viel robuster gegen Softwarefehler. Außerdem beinhaltet der SmartHeater im Gegensatz zu konventionellen Heizelementen eine durchgehende Matrix. Auch punktuelle Schäden behindern daher nicht den Betrieb des SmartHeaters.
Missionsphase 2 - Wiedereintritt ab 200km Höhe

Wiedereintritt
Die Re-Entry Measurement Payload von SOURCE ist darauf ausgelegt, die Bedingungen beim Wiedereintritt des CubeSats in die Erdatmosphäre zu untersuchen. Dazu gehören Druck-, Temperatur- und Wärmeflussmessungen. Durch die Sensordaten können bessere Materialmodelle für Satelliten entwickelt werden, wodurch Wiedereintritte besser vorhergesagt werden können. Außerdem können zukünftige Satellite nach dem „Design for Demise“ (dt.: Entwurf für Vergehen) Prinzip konstruiert werden. So kann verhindert werden, dass gefährliche Bruchstücke auf die Erde fallen, anstatt vollständig in der Atmosphäre zu verglühen.

Atomarer Sauerstoff
Ein weiterer Bestandteil der Wiedereintrittssensorik sind die Sensoren des Flux Phi Probe Experiments (FIPEX). Auf der Stirn- und Rückseite von SOURCE ist je ein Sensor angebracht. Die Sensoren werden auf 800°C erhitzt, um den Gehalt von atomarem Sauerstoff in der Umgebung zu bestimmen. Atomarer Sauerstoff ist sehr reaktiv und führt daher zu starker Korrosion auf allen freiliegenden Oberflächen. Dies betrifft inbesondere Solarzellen, wodurch die generierte Leistung über die Missionsdauer kontinuierlich sinkt. Daher sind exakte Modelle zur Vorhersage der Konzentration auf der Umlaufbahn eines Satelliten sehr wichtig. SOURCE kann diese Modelle gut ergänzen.
SOURCE Subsysteme
Projektleitung
Die studentische Projektleitung behält den Überblick. Egal ob Zeitplan, Teamevents, Finanzierung oder Öffentlichkeitsarbeit: Hier laufen alle Fäden zusammen. Unterstützt wird die Projektleitung dabei von Mitarbeitern des Instituts für Raumfahrtsysteme.
Systemingenieure
Mechanische, elektrische und Datenschnittstellen zwischen Subsystemen werden von den Systemingenieuren koordiniert. Dazu gehört auch die Verwaltung von Massen- und Powerbudgets. Weiterhin planen die Systemingenieure alle benötigten Tests. Außerdem wird die gesamte Testdokumentation mit dem internen Teststandard abgeglichen, um eine hohe Qualität zu fördern.
Payload
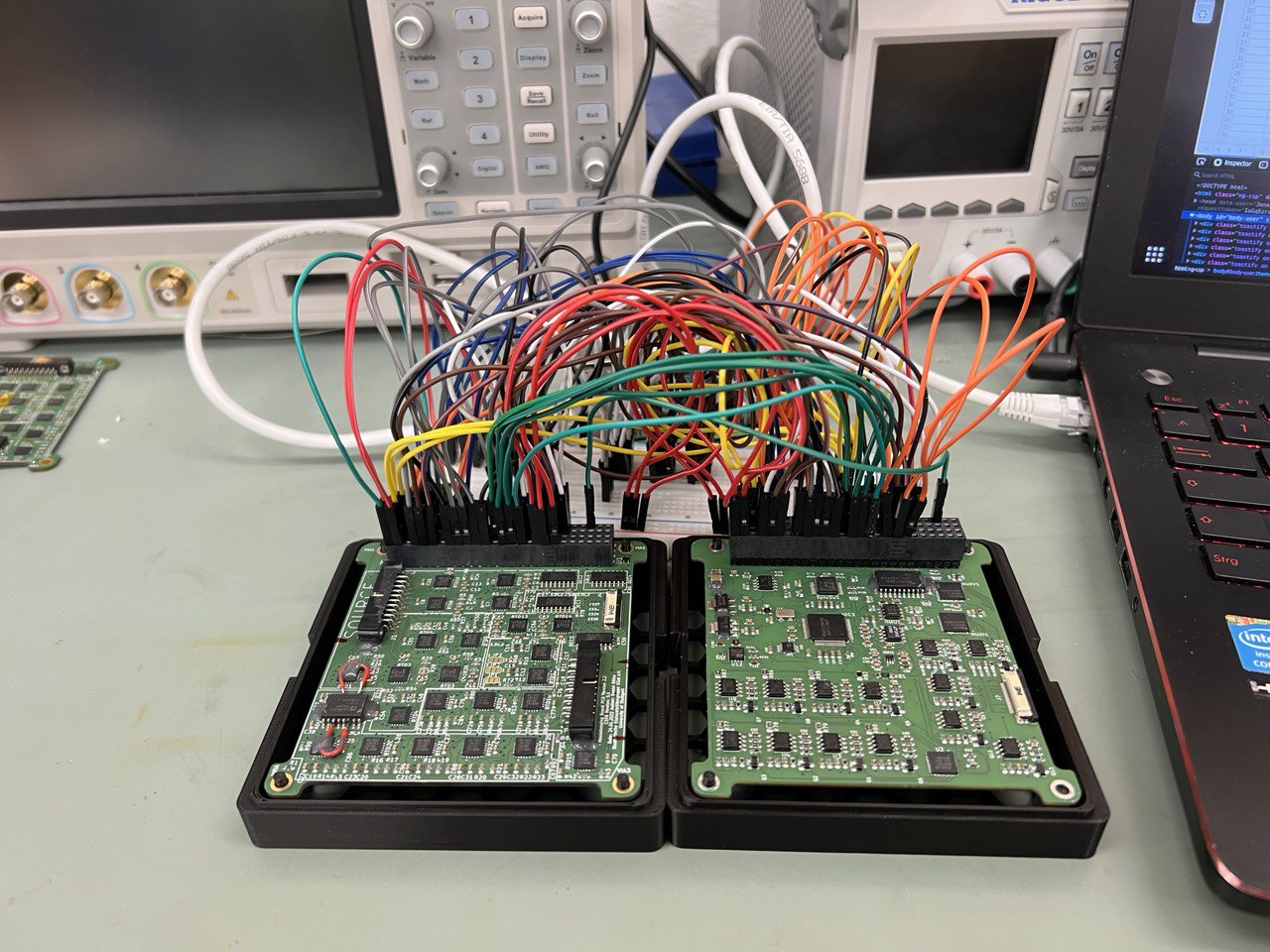
Dieses Subsystem entwickelt und testet alle hauseigenen Nutzlasten. Das Team ist in zwei Gruppen unterteilt: Die erste Gruppe beschäftigt sich mit dem Kamerasystem. Dazu gehören sowohl Charakterisierungen der Kameras als auch Softwareentwicklung für den Nutzlast Onboard Computer. Die zweite Gruppe entwickelt die Wiedereintrittssensorik. Diese sind zwar „Commercial-Off-The-Shelf“ (COTS), die Ansteuerung geschieht jedoch über selbstentworfene Platinen. Kern dieser Platinen ist ein strahlungsresistenter Vorago Microcontroller, der auch während des Wiedereintritts Daten sammelt. Außerdem übernimmt das Payload Subsystem die Integration der externen Payloads und der FIPEX Nutzlast.
Struktur, Thermal & Harness
Attitude Control System
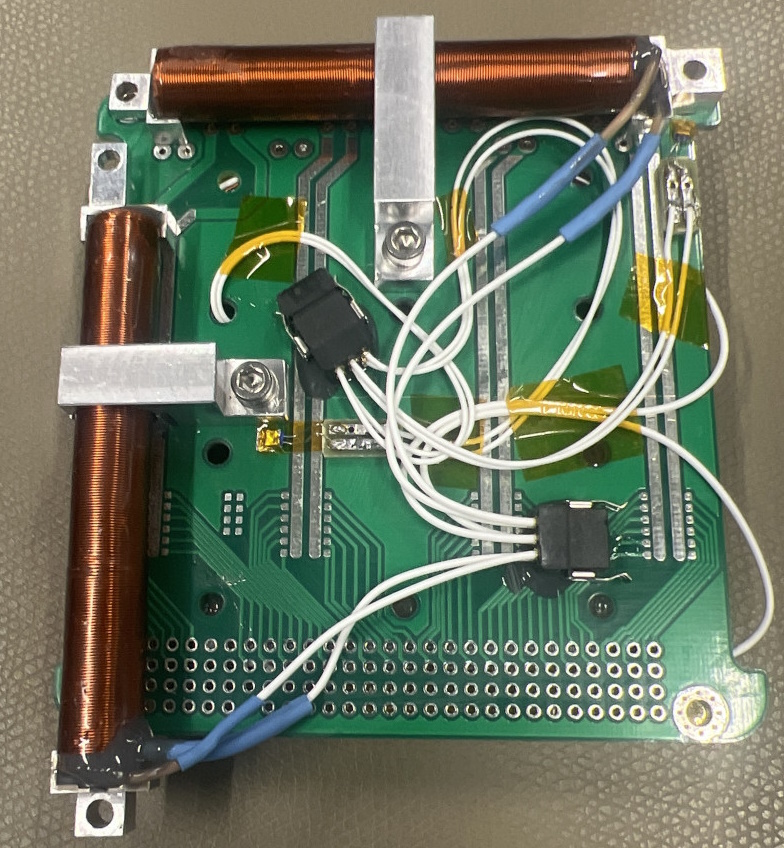
Das Attitude Control System ist verantwortlich für Lagebestimmung und Lageregelung von SOURCE. Zur Bestimmung der Position und Ausrichtung sind GPS, Sonnensensoren, Magnetometer und Gyroskope im Satelliten integriert. Nach der Verarbeitung der Daten mithilfe eines Kalman-Filters steuert das Subsystem die Ausrichtung von SOURCE je nach Missionsphase: Nach dem Auswurf aus der Rakete wird SOURCE stabilisiert und die Solarpanele zur Sonne ausgerichtet. Im nominellen Betrieb können die Kameras in ihre gewünschten Richtungen gedreht werden. Während des Wiedereintritts wird das ACS Subsystem versuchen, den Satelliten so lange wir möglich stabil zu halten. Für die Umsetzung dieser Aufgaben werden 3 Magnetorquer auf SOURCE verwendet, die sich am Erdmagnetfeld ausrichten und so den Satelliten drehen. Diese Magnetorquer wurden eigenhändig von Studierenden entwickelt und hergestellt.
Onboard Data Handling & Software
Das Onboard Data Handling und Onboard Software Subsystem ist das zentrale Steuersystem und überwacht den Zustand des Satelliten, speichert Telemetriedaten und führt Befehle aus. Es basiert auf einem iOBC mit einem 400 MHz ARM9-Prozessor und mehreren Speichermodulen sowie Schnittstellen, um die Kommunikation mit anderen Subsystemen zu gewährleisten. Zu den Hauptaufgaben gehören die Datenspeicherung, Übergänge zwischen Betriebsmodi, die Verarbeitung von Steueralgorithmen und die Fehlererkennung. Die Software nutzt das Echtzeitbetriebssystem FreeRTOS und das Flight Software Framework (FSFW), das speziell für Weltraumanwendungen vom Institut für Raumfahrtsysteme der Universität Stuttgart entwickelt wird.
Electrical Power System
Das Electrical Power System ist für die Energieerzeugung, -speicherung und -verteilung an andere Subsysteme zuständig. Es verfügt über eine selbst entwickelte Solarzellenkonfiguration mit 56 Solarzellen, die bis zu 32W Leistung erzeugen. Diese Leistung wird in einer 86Wh Lithium-Ionen-Batterie von GomSpace gespeichert. Anschließend erzeugt die eigenentwickelte Power Conditioning and Distribution Unit (PCDU) alle benötigten Spannungslevel, welche anschließend über 32 einzeln schaltbare Ausgänge an andere Subsysteme geleitet werden. Die Kontrolle liegt dabei bei einem strahlungsresistenten Vorgao Microcontroller. Um die Leistung der Solarpanele zu maximieren, wird Maximum Power Point Tracking (MPPT) onboard durchgeführt. Zur Missionssicherung sind redundante und ausfallresistente Komponenten eingebaut.
Communications
Das Kommunkations-Subsystem erfüllt drei Hauptaufgaben: den Empfang von Steuerbefehlen, das Senden von Statusinformationen und die Übertragung von Nutzlastdaten. Kritisch sind vor allem die Steuerbefehle und Statusinformationen, da fehlerhafte Befehle den Satelliten gefährden können. SOURCE kommuniziert während des nominellen Betriebs im S-Band (2–2.4 GHz) direkt mit der Bodenstation. Daten werden gemäß CCSDS-Standards mit fehlerkorrigierenden Algorithmen gesendet. Da der Wiedereintritt nicht direkt über einer Bodenstation stattfindet, kann SOURCE über das L-Band (1.6 GHz) auf das kommerzielle Iridium-Satellitennetzwerk zugreifen, um Daten unabhängig von der Position zu senden. Dieses System kann auch als Backup während der ersten Missionsphase genutzt werden.
Operations & Ground
Das Operations & Ground Subsystem von SOURCE ist für die geplante Steuerung des Satelliten und den Aufbau der Bodeninfrastruktur verantwortlich. Dazu gehören die Bodenstation des IRS, das Missionskontrollsystem sowie ein Missionsplanungstool inklusive eines Flugdynamik-Tools. Die bestehende Bodenstationssoftware muss für SOURCE angepasst und automatisiert werden, um die zukünftige Satellitensteuerung zu erleichtern. OPS&GND erstellt zudem das Benutzerhandbuch, entwickelt eine Satelliten-Datenbank für die Kommunikation und ist für die Erstellung sowie das Testen von Betriebsabläufen zuständig. In enger Zusammenarbeit mit allen anderen Subsystemen wird das kritische Training für den Start und die frühe Orbitphase vorbereitet und durchgeführt.
Simulation & Testbed
Um die Software des Onboard Computer (OBC) zu testen, entwickelt das Simulation und Testbed Subsystem einen Simulator, der künstliche Daten an den OBC senden kann. Dadurch kann die Reaktion der Software auf beliebige Szenarien getestet werden. Somit wird die Robustheit erhöht und SOURCE im Orbit sicherer. Außerdem betreut das Subsystem den „FlatSat“: Hier werden alle Einheiten des Satelliten auf einem Tisch ausgebreitet und anschließend elektrisch verbunden. Durch die Exposition sämtlicher Anschlüsse wird die Fehlersuche erheblich vereinfacht.
Wir suchen dich!
Hat SOURCE dein Interesse geweckt? Wir sind immer auf der Suche nach neuen Mitgliedern!
Egal ob du gerade im 1. Semester anfängst oder schon Raumfahrtexperte bist und egal, was du studierst: Wir finden für alle eine spannende Position in unserem Team.
Falls du jetzt schon weißt, worauf du Lust hast, kontaktiere uns!
Eine Teilnahme an SOURCE ist freiwillig oder im Rahmen der fachaffinen SQ Praktikum CubeSat Technik möglich, solltest du an der Universität Stuttgart studieren. Zudem ist die SQ-Teilnahme auch im Rahmen unserer Projekte SOURCE-2 und ATHENE möglich. Für die Teilnahme werden 3 ECTS angerechnet.
Fly Your Satellite!
Neugierig?
Das Fly Your Satellite!-Programm bietet immer wieder die Möglichkeit, studentische Teams bei der Entwicklung ihres Satelliten zu unterstützen.
Ein Besuch der ESA-Website lohnt sich, um die neuesten Updates hierzu zu erhalten!
Timeline
Beginn des SOURCE Projektes
Nach dem Erfolg des Flying Laptop (FLP), beschließen der Kleinsatellitenverein KSat e.V. und das Institut für Raumfahrtsysteme IRS der Universität Stuttgart, einen CubeSat zu bauen.
PRR (Preliminary Requirement Review) und Beginn von Phase B
An der Universität Stuttgart stellen die Studierenden des SOURCE Teams die genauen Randbedingungen der Mission vor. Damit wird Phase A, die Missionsanalyse, abgeschlossen und Phase B, die Definitionsphase, beginnt.
PDR (Preliminary Design Review) und Beginn von Phase C
Mehr als 70 Reviewer, darunter Angehörige von Tesat-Spacecom, Thales Alenia Space, Airbus, dem DLR Bremen und befreundenten Raumfahrtgruppen, beurteilten das vorgestellte vorläufige Design von SOURCE. Die Reviewer einigten sich darauf, dass SOURCE in die Phase C fortfahren kann. In dieser wird das endgültige Design durch iteratives Testen von Einheiten entwickelt.
Ausschreibung Fly Your Satellite
Die Europäische Weltraumorganisation (ESA) veröffentlicht die Ausschreibung für die dritte Runde des "Fly Your Satellite!"-Programms, das darauf abzielt, Universitätsstudenten bei der Entwicklung und dem Start von CubeSats zu unterstützen.
Auswahl von SOURCE für Fly Your Satellite
Das SOURCE Team nimmt am Auswahl-Workshop im ESTEC-Forschungszentrum in den Niederlanden teil und wird als eines von vier Projekten für die Teilnahme am "Fly Your Satellite! 3"-Programm ausgewählt.
Abschluss des CDR (Critical Design Review)
Das Review-Board des "Fly Your Satellite!"-Programms bestätigt die Qualität und Vollständigkeit des SOURCE-Designs, wodurch der Übergang in die Integrationsphase ermöglicht wird.
Beginn der Phase D – Integrations- und Testphase
SOURCE tritt in Phase D ein, in der die Hardware des Satelliten gebaut, getestet und zu einem Gesamtsystem zusammengesetzt wird.
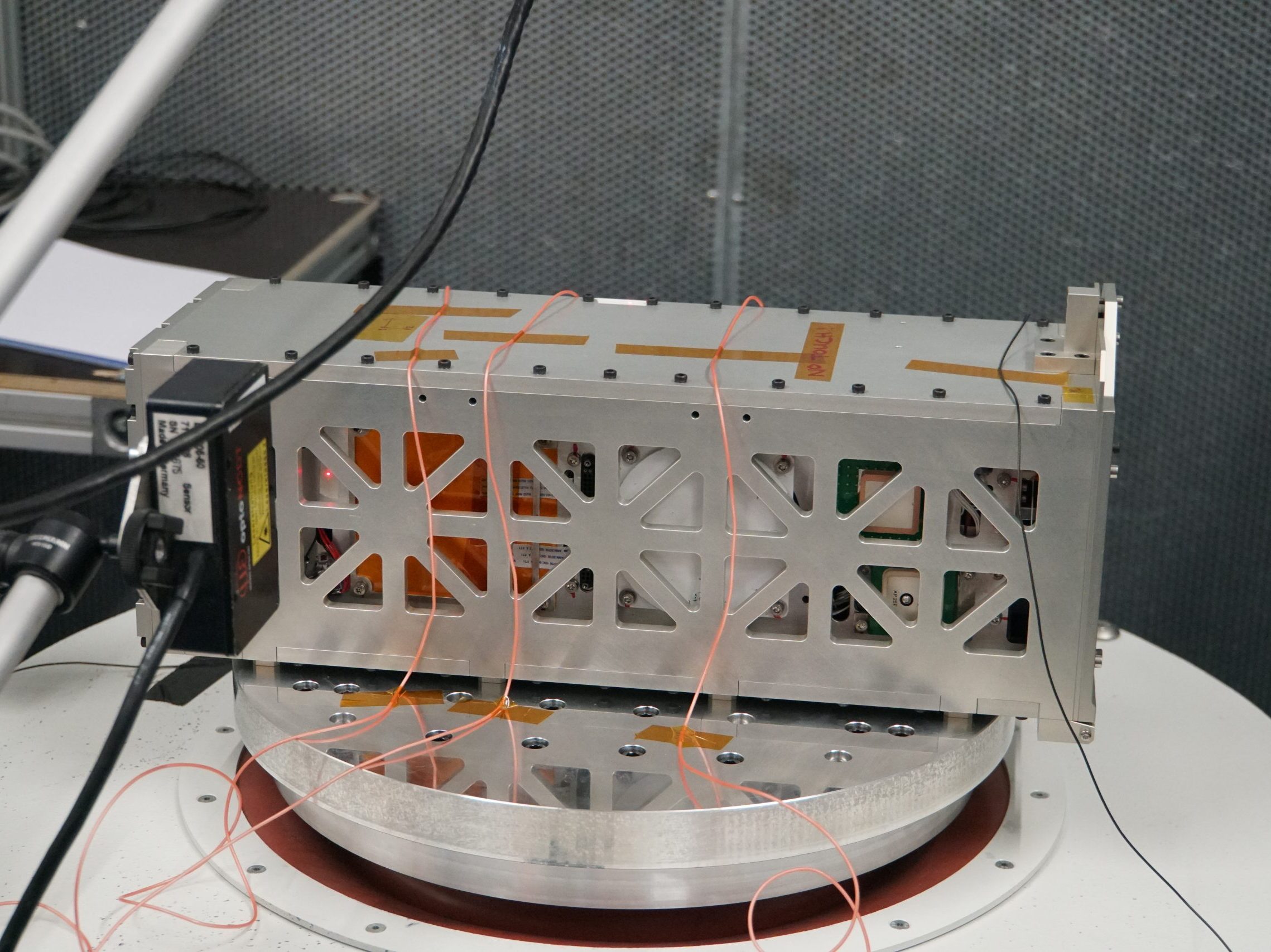
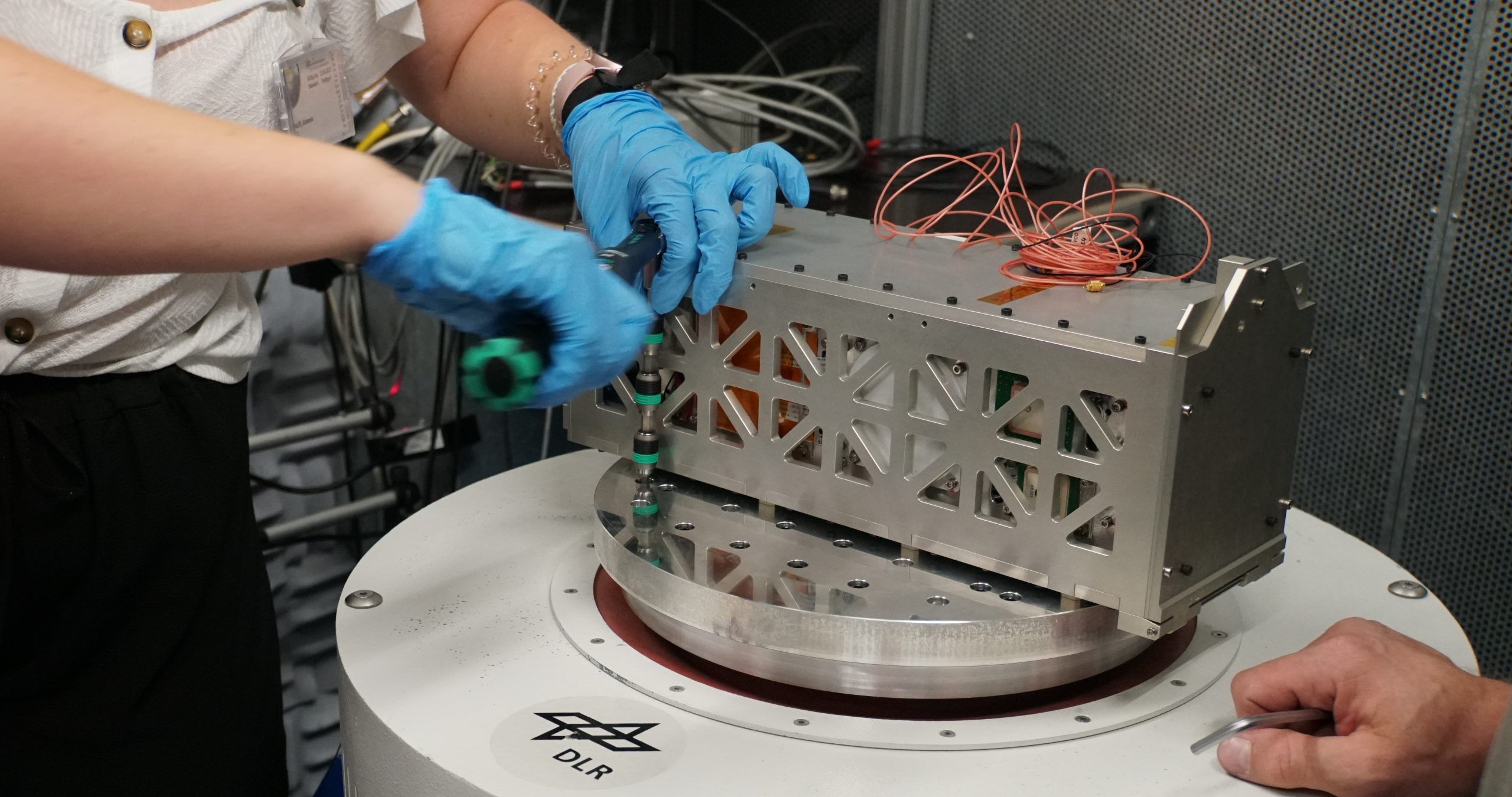
Bau des Strukturmodells und systemweite Shaker-Tests
Von Januar bis März wird SOURCE zum ersten Mal vollständig integriert. Das Ziel ist die Qualifikation aller Einheiten in einem Shakertest des Gesamtsystems. Nach der Testkampagne ist SOURCE vollständig qualifiziert, die Belastungen des Starts in einer Rakete zu überstehen.
Durchführung des MRR (Manufacturing Readiness Review)
Das Team des "Fly Your Satellite!"-Programms überprüft die Qualifikation aller Komponenten sehr genau. Nach dem Review steht fest: Das SOURCE Team kann beginnen, die Flughardware herzustellen.
Geplanter Start des SOURCE-Satelliten
Der Start des SOURCE-Satelliten ist für 2028 vorgesehen, wobei das genaue Datum von der Verfügbarkeit des Trägers und weiteren Faktoren abhängt.




Galerie




Partner





Sponsoren





Unterstützer








